OpenRMF¶
Overview¶
The core rmf packages provide the centralized functions of the Open Robotics Middleware Framework (OpenRMF). These include task queuing, conflict-free resource scheduling, utilities to help create robot fleet adapters, and so on.
OpenRMF is built on ROS 2. However direct use of ROS 2 is not required to use Open-RMF.
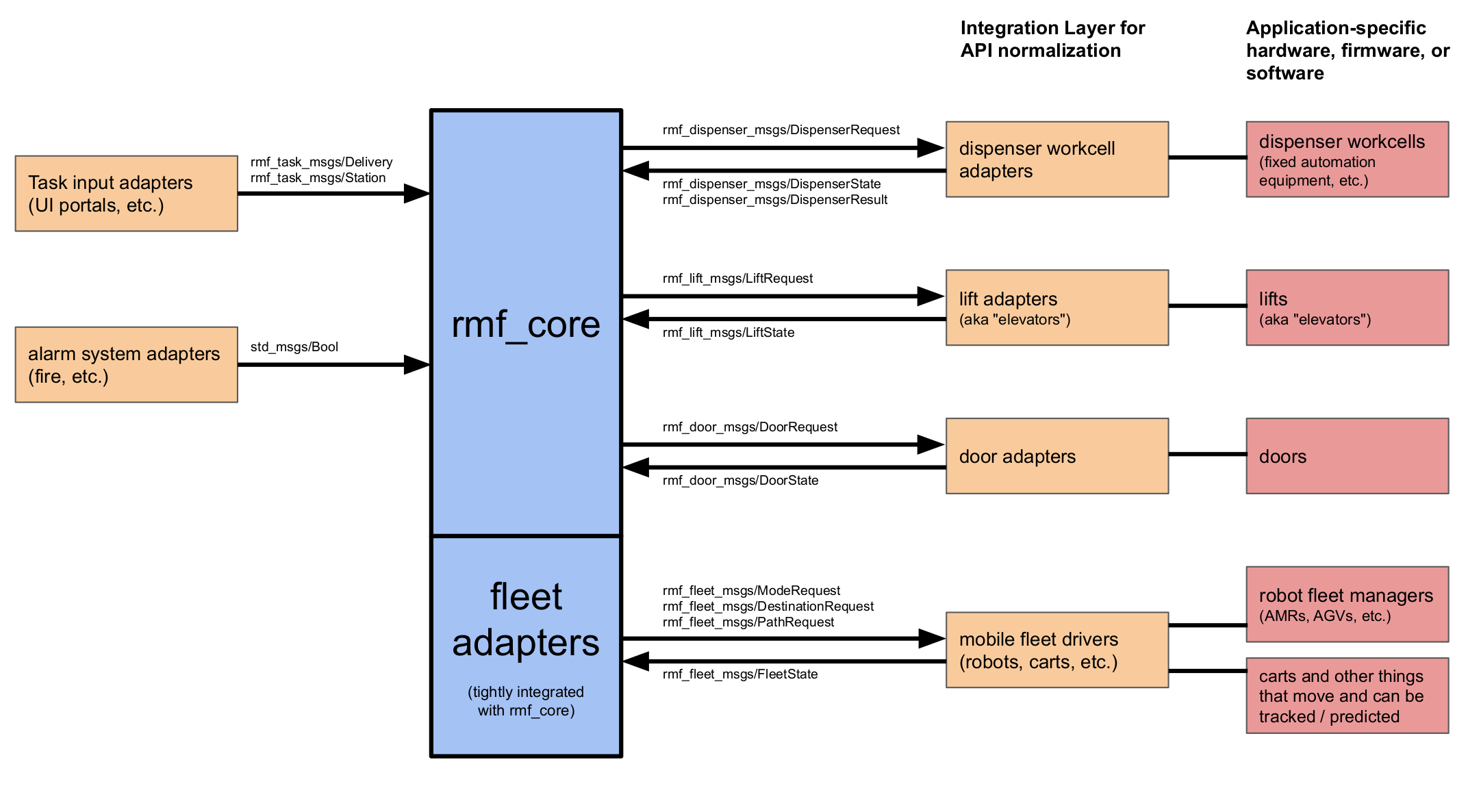
To create a useful deployment, the core of rmf must be connected to many other subsystems, as shown in the following diagram.